
GRIP – Grippers
GRIP – Grippers are sophisticated tools designed to capture, hold, move, or manipulate various objects in industrial automation applications.

Grippers serve as robotic “hands” that allow physical interaction between the robot or automation system and the object being handled. Available in different types, such as pneumatic, electric, or hydraulic, GRIP – Grippers offer high flexibility, precision, and durability to meet diverse application needs.
The Product for Grippers :
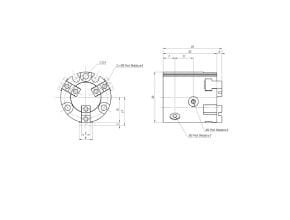
Three-finger parallel gripper Ø16
MCHG2-16M is a three-finger parallel gripper with magnet with a 16mm internal diameter and a 4mm stroke. Made of anodised aluminum (extremely resistant to corrosion) and carbon, it can be used between -10 and 60°C. The (external) gripping force is 14N.

Specification
| Weight | 80 g |
|---|---|
| Diametre | 16 |
| Force – Draw | Double action |
| Heat Resistance °C | 60 |
| Material | Aluminum + carbon |
| Stroke (Mm) | 4 |
| Thread | M3 |
| Manufacturer | Mindman |
| Item | MCHG2-16M |
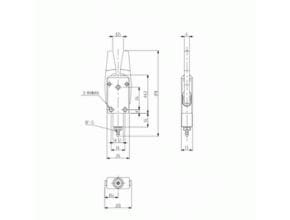
High-precision Runner Chuck EMR (w/o sensor)

Thanks to the rubber caps on its fingers, the grip achieved with the CHK-EMR-12 angular gripper is flawless and precise, as even the thinnest sprues or products are prevented from slipping away. Finger caps are replaceable.
Specification
| Weight | 44,3 g |
|---|---|
| Air pressure | 0.3-0.5 MPa |
| Material | Superduralumin |
| Diametre | 12 |
| Manufacturer | Eins-Star |
| Item | CHK-EMR-12 |
Finger Cap for EMR Gripper

CHK-EMR-CPE is the replacement finger cap for our CHK-EMR-12 angular gripper.
Specification

| Weight | 0,6 g |
|---|---|
| Material | Rubber |
| Manufacturer | Eins-Star |
| Item | CHK-EMR-CPE |
Auto Switch

D-A93 is a reed SW auto switch with indicator lamp. It can be used for mini cylinders.
Specification

| Weight | 6 g |
|---|---|
| Item | D-A93 |
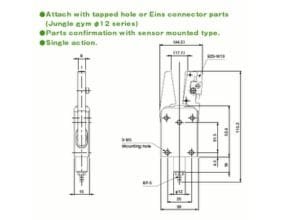
Runner Chuck EL w/o Sensor

CHK-EL-12 gripper has straight superduralumin claws. Its gripping force is 45N.
Specification
| Weight | 94 g |
|---|---|
| Diametre | 12 |
| Material | Superduralumin |
| Air pressure | 0.3-0.5 MPa |
| Manufacturer | Eins-Star |
| Item | CHK-EL-12 |
Source : eins1.eu
Read More Articles :
- Thincke Gas Cylinder Level Sensor
- Thincke Electronic Hardware and Software for The Internet
- Transmitter CTV 110 Temperature air velocity and temperature sensor
- SMALLINE Double Diaphragm Pumps
- Marelli Motori D5H – D5L Series for Oil & Gas