

Description
Capacitive Proximity Sensors are used to sense the presence of objects or materials. What differentiates them from other sensors is that they don’t make physical contact with the object being sensed, and hence they’re also known as non-contact sensors.
One of the most common sensor types is the capacitive proximity sensor. As the name suggests, capacitive proximity sensors operate by noting a change in the capacitance read by the sensor. A typical capacitor consists of two conductive elements (sometimes called plates) separated by some kind of insulating material that can be one of many different types including ceramic, plastic, paper, or other materials.
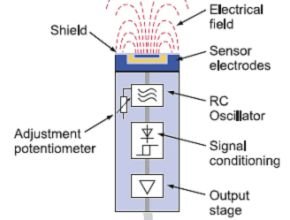
The way a capacitive proximity sensor works is that one of the conductive elements, or plates, is inside the sensor itself while the other one is the object to be sensed. The internal plate is connected to an oscillator circuit that generates an electric field. The air gap between the internal plate and the external object serves as the insulator or dielectric material. When an object is present, that changes the capacitance value and registers as the presences of the object.
Capacitive proximity sensors are useful in detecting a wide range of objects. The easiest types of objects to detect are ones with a high density (such as metals) or a high dielectric constant (i.e. water). And detecting these objects doesn’t require that the sensors be fairly close to the objects to be detected, another plus if used in settings with little space to work in. Overall, good sensing targets for capacitive sensors include solids and liquids such as various metals, water, wood, and plastic.
A typical sensing range for capacitive proximity sensors is from a few millimeters up to about 1 in. (or 25 mm), and some sensors have an extended range up to 2 in. Where capacitive sensors really excel, however, is in applications where they must detect objects through some kind of material such as a bag, bin, or box. They can tune out non-metallic containers and can be tuned or set to detect different levels of liquids or solid materials.
Photoelectric proximity sensors

Photoelectric Proximity sensors are used to sense the presence of objects or materials across a broad range of industrial and manufacturing applications. The key to their operation is that they don’t require physical contact with the target or object being sensed. This is why they’re often called non-contact sensors.
One of the most common types of proximity sensors is the photoelectric sensor. These sensors detect objects directly in front of them by detecting the sensor’s own transmitted light reflected back from an object’s surface. A common arrangement is that both the emitter and receiver are housed in the same unit, but not all photoelectric sensors are constructed this way.
There are three basic configurations for photoelectric proximity sensors; reflective, through-beam, and proximity.

Reflective sensors
In this type of sensor, a beam of light is sent out from an emitter and is bounced off of a reflector back to a detector. When the light beam is able to reflect back, this registers as no object being present. The beam failing to reflect back means there is an obstruction, which registers as the presence of an object. These sensors are less accurate than other types, but they’re also easier to install and wire and typically cost less than through-beam sensors.
Through-beam sensors
In this type of setup, an emitter sends out a beam of light usually directly in the line-of-sight of the emitter to a receiver. When an object breaks this beam of light, it’s detected as a presence. This type of setup requires two components; an emitter and a separate detector, which makes it a bit more complex to install and wire. However, the advantage is that it’s the most accurate of the sensing methods with the longest sensing range.
Proximity (diffuse) sensor
Diffuse photoelectric sensors are similar in some respects to reflective sensors. This is because like reflective sensors they emit a light beam in the direction of the object to be detected. However, instead of a reflector used to bounce the light back to a detector, the object to be sensed functions as the reflector, bouncing some of the light back to be detected and register an object’s presence.
For further please contact: marketing@wmabog.com